



Aeronautic Navigation Instruments: An Overview for the VFR Pilot
Magnetic Compass
The simplest of aeronautic navigation instruments that is most often used for basic orientiation is the magnetic compass. Operation
The principle of the compass’s magnetised needle aligning itself to the field lines of the earth magnetic field allows the pilot to determine the heading of the aircraft in relation to magnetic north. The readings will usually show N, S, E and W with the intervals between marked for each 30º. Further sub-divisions between the 30º marks are shown for every 5º.
Figure: magnetic compass with deviation card There are a number of magnetic compass designs used in aircrafts. One that is present in most aircraft is the floating magnet type. Here the magnetic needle is integrated into a floating disk that carries the markings of the compass rose on its circumference. A lubber line indicates the current magnetic heading of the aircraft. Note, that when the lubber line indicates North the part of the disk that points North is actually on the opposite side of the disk. Consequently, the markings appear backwards – East is on the West side and vice versa. This could be confusing at first.
Another design that avoids this confusion is the vertical card magnetic compass. Here the nose of a symbolic aircraft points to the magnetic heading on a compass rose.
The earth magnetic field has a horizontal and a vertical component. The compass needle will react to both the horizontal and the vertical force. The horizontal component is used for navigation, as it is responsible for the magnetic needle pointing to magnetic north. However, the effect that the vertical component has on the compass performance should also be understood, as it affects the accuracy of the compass reading significantly. One could imagine the magnetic needle pointing directly down when at the magnetic pole. This effect of pulling the magnetic needle down is called the "magnet dip". Make sure you read the section on turning and acceleration errors on the Navigation Basics Page to understand the effects that the magnetic dip has on compass indication. Coverage
In principle the magnetic field is present everywhere on earth. The direction and strength is, however, influenced by a number of geographic factors. As a result the difference in direction between the North Magnetic Pole and the North Geographic Pole (the variation) sometime shows anomalies. This is reflected in bent variation lines. As the magnetic compass is ultimately used to determine the direction to Geographic North (in a process that takes into account the variation) these anomalies are of no practical importance as they are included in the variation. In other words, it is enough to know the variation in the area to find the correct direction to Geographic North. Make sure you read the section on variation on the Navigation Basics Page . It should also be noted that the increasing downward component of the earth magnetic field the closer one gets to the magnetic poles, makes the compass less useful at latitudes higher than 60° North or South.
Accuracy and Errors
An aeroplane is made up of metal, rotating parts of an engine, electric equipment, etc., all of which can generate their own magnetic field. Naturally, these fields affect the compass reading deflecting it from accurately indicating Magnetic North.
An engineer who has checked the compass in any particular aeroplane might have tried to minimise the deflection by placing little magnets around the compass. The remaining deflection after such corrective action is called Deviation. Each aeroplane displays a small placard, known as the Deviation Card, which shows the pilot the corrections to be made to the compass reading to obtain the magnetic direction.
Obviously the deviation card can only take into account the influences that were present when the engineer calibrated the compass. Any magnetic influences introduced after the calibration procedure can still affect the compass reading. Therefore, one should keep in mind that materials with their own magnetic field placed in the vicinity of the compass can have a significant effect. In particular large metal items or electronic devices, such as headphones or calculators, can cause large and unpredictable errors.
There are other errors that affect the compass reading when the aeroplane accelerates or turns (to do with magnet dip as mentioned above). Make sure you read the applicable paragraphs on the Navigation Basics Page to understand these effects. The Automatic Direction Finder (ADF)
Operation
The simplest radio navigation aid used in aviation is a ground-based transmitter which transmits radio signals in all directions without differentiation: the Non-Directional Beacon (NDB). The counterpart instrument fitted in the aeroplane is called the Automatic Direction Finder (ADF) and consists of two arials, a receiver and an indicator. The indicators needle simply points to the selected NDB ground station. In that respect it works similar to the magnetic compass with its needle pointing to magnetic North. Therefore, the ADF/NDB system is sometimes called the Radio Compass.
There are a number of indicator types – the fixed-card indicator, the moving-card indicator and the Radio Magnetic Indicator (RMI). In the fixed-card indicator the card has a fixed compass rose where north is always in the top position. This type of indicator displays the relative bearing to the NDB station. The moving-card indicator and the RMI both have a rotating azimuth card – the former needs to be adjusted maually, where the latter rotates automatically, controlled by a gyro compass to represent the aircraft heading. The RMI also has two needles which can indicate the navigation information from the ADF or VOR. The head of ADF needle of the RMI points to the magnetic bearing to the selected NDB station, i.e. the magnetic heading plus the relative bearing equals the magnetic bearing.
Figure: ADF with fixed card indicator
Figure: RMI NDB stations transmit on a given frequency in the low-frequency or medium-frequency LF/MF bands (that is between 200 and 1750 kHz). Each NDB or Locator is identifiable by a two- or three-lettered Morse code identification signal which is transmitted along with its normal signal, the so called IDENT.
The Pilot must identify an NDB before using it for navigation and, if using it for some length of time, periodically re-identify it. The lack of an IDENT may indicate that the NDB is out of service, even though it may still be transmitting (for instance for maintenance or test purposes). If an incorrect IDENT is heard, then it must also not be used.
Most NDBs can be identified by selecting AUDIO on the ADF and listening to the Morse code signal. The correct code can be found for instance on the ICAO 1:500000 series aeronautical chart or in the Aeronautical Information Publication (AIP).
There are a number of different IDENT characteristics depending on the type of transmission.
Most NDBs can be identified with the ADF mode selector in the ADF position. However, there are also NDBs that can only be identified, if the pilot has selected BFO (Beat Frequency Oscillator). In this setting a tone is imposed onto the NDB carrier wave and makes it audible. Such NDBs are shown on charts without inverted commas, for example MP at Cherbourg in France.
Some NDBs carry voice transmissions, such as the Automatic Terminal Information Service (ATIS) at some aerodromes. It is also possible, such as in a situation where the communications radio (VHF COM) has failed, for ATC to send voice messages to the Pilot on the NDB frequency and for him to receive them on the ADF if AUDIO is selected.
Figure: NDB on the chart Coverage
NDB/ADF is used extensively throughout the world for navigation.
The range of an NDB depends upon:
A relatively strong NDB with a range of 100 nm or more would be required for long-range en route navigation where no other aids are available. Some NDBs may even have a range of 400 nm when used for long distance overwater tracking, for instance in the Pacific area. In more densely populated areas, however, where routes are relatively short and there are many navigation facilities, most NDBs have only a short range.
For manoeuvring in the vicinity of aerodromes, only lower powered NDBs are required. NDBs used for approaches are referred to as Locators. If a Locator is co-located with an Outer Marker that serves to fix a position as an aircraft proceeds down an Instrument Landing System (ILS) approach, then it will be depicted on the ILS Approach Chart as LOM (Locator Outer Marker).
The range of each Non-Directional Beacon (NDB) or Locator (L) may be found in AlP COM 2, and within this promulgated range the NDB should provide bearings accurate to within +/—5º. The promulgated range also provides guidance as to when attention should be shifted to the next aid.
Accuracy and Errors
An ideal NDB signal received at an aeroplane may be accurate to +/-2º. However, there are a number of factors that may reduce this accuracy to a considerable degree. These include the following effects:
VOR
Operation
The Very High Frequency Omni-Directional Radio Range, commonly abbreviated to VOR, VHF Omni Range, or Omni, is a radio navigation aid operating in the frequency band 108.0 MHz to 117.95 MHz. This is a lower frequency band than that used for VHF Communications, but significantly higher than that used for NDB/ADF. There is relatively little interference from atmospheric noise in this band, so VOR allows high quality line-of-sight reception.
A VOR ground station transmits two VHF radio signals:
The aerial of the VOR airborne receiver then picks up the signals and measures the phase difference between them. With this difference depending upon the bearing of the aeroplane from the ground station, the VOR can determine the magnetic bearing of the aeroplane from the VOR ground station.
The Pilot should positively identify the VOR by the Morse code IDENT signal transmitted every 10 seconds or so. Some VORs may also carry voice transmissions with a relevant Automatic Terminal Information Service (ATIS).
The airborne component of VOR consists of the antenna, the receiver and the cockpit display. A separate VHF-NAV radio is required for navigation purposes, but is usually combined with the VHF-COM in a NAV/COM set.
There are various types of VOR cockpit display, however, they are all similar in operation. The VOR cockpit display is also referred to as the Omni Bearing Indicator, or OBI. It displays the Omni Bearing selected by the Pilot on the Course Card using the Omni Bearing Selector (OBS), a small knob which is geared to the card.
The straight line magnetic bearings extending outwards from the ground station are called radials. Radials are identified by a number starting from 1° east of magnetic north (i.e. 001) clockwise through 360°. If the aeroplane is on the selected radial or its reciprocal, then the VOR Needle in the OBI, known as the Course Deviation Indicator or CDI, will be centred. The outer edge of the center circle represents 2° off-course, each dot represents further 2° out. Full deflection of the CDI indicates that the aircraft is more than 10° off the selected radial.
With the aeroplane being on the radial, the TO/FROM flag indicates whether the selected track would take the aeroplane to or from the VOR ground station. There is also some means of indicating insufficient signal strength – usually in form of an OFF flag.
The OBI is only to be used for navigation if:
Figure: VOR on chart Most aeronautical charts show the position, frequency and Morse Code identification (IDENT) of each VOR ground station. Information on a particular VOR can be found in the AIP COM. Changes to this information will be referred to in Notices to Airmen (NOTAMs). The pilot should check these during flight preparation.
A VOR ground station may be represented in various ways on a chart. Since Magnetic North is the reference direction for VOR radials, a Magnetic North arrow-head usually emanates from the VOR symbol, with a compass rose heavily marked each 3 degrees and the radials shown in 10º intervals on the rose. This generally adequate for in-flight estimation of track to an accuracy of +/-2º, however, when flight planning, it is advisable to be more accurate.
At the Flight Planning stage, the pilot should use a protractor or plotter for precise measurement of track, although in some cases this may not be necessary because some much-used tracks are published on Radio Navigation Charts (RNCs) in degrees Magnetic. If the pilot measures the track in degrees True (0ºT), then Magnetic Variation needs to be applied to invert to degrees Magnetic ("Variation West, Magnetic Best").
Distance Measuring Equipment (DME) is a navigation aid that is often combined with VOR and works in the UHF band. Such combination is then called VOR/DME. DME is also an integral part of VORTAC – a combination of VOR and the military tactical air navigation (TACAN).
Not all airplanes are DME equipped. DME measures the direct distance between the aircraft and the VOR station, the so called slant range distance. Therefore, it depends on the altitude of the airplane. Most DME receivers are also capable of displaying the ground speed and time-to-station. However, these work accurately only when navigating along a radial to or from station.
Coverage
The approximate maximum range of a VHF signal is given by the formula: VHF Range in nm = the square root of (1.5 x altitude in feet)
Example: At 7,000 ft AMSL, approximate VHF range = square root of (1.5 x 7,000) = square root of (10,000) = 100 nm.
Errors and accuracy
Reception may be affected by the terrain surrounding the ground station, the height of the VOR beacon, the altitude of the aeroplane and its distance from the station.
Since the VOR uses VHF signals, it is accurate as long as the aircraft is in "line of sight" of the transmitter. The only problem may be that if the aircraft is at a sufficiently high altitude, then there is the possibility that two VORs on the same frequency could cause interference.
To counteract this, the AIP publishes the range and altitude at which one can expect to receive a reliable signal for each VOR, the so called "Designated Operational Coverage" (DOC) figures.
When a VOR is operating normally, the radials are transmitted to an accuracy of at least +/- 2º.
Ground radar
Operation
Primary radar involves the transmission of energy in the form of very short pulses, to determine the range and bearing of an object. Any object in the path of the pulses, will reflect and scatter the energy. Some of the reflected energy will reach the receiver allowing the calculation of range and bearing to be made.
The strength of the reflected echoes depends upon the following factors:
The calculation of range and bearing of the reflecting object from the transmitting source does not require any co-operation from the target.
Most radar screens are simply Cathode Ray Tubes (CRT) that resemble circular television screens. Using the same principle as television, a beam of electrons is directed onto the fluorescent coating of the CRT to provide a radar picture. Radar controllers generally have circular displays showing the position of the radar antenna in the centre, with range marks to aid in estimating distance. The radar screen is also known as a Plan Position Indicator (PPI).
The actual radar dish may be located away from the position of the radar controller, possibly on a nearby hill or tower. As the radar antenna rotates slowly, the small electron beam in the controller's CRT also rotates, leaving a faint line or trace on the screen in a direction aligned with the direction of the antenna at that moment. Any radar return signal appears as a blip at the appropriate spot on the screen.
An indication of North on the screen allows the controller to estimate the direction of the target, and the range marks assist in estimating its distance. The blip of the target remains visible for some seconds after the small trace line has moved on, and will still be visible (but fading) as its next blip occurs in the following revolution. This fading trail of blips allows the Controller to determine the motion of the target in terms of direction and speed.
In areas of high traffic density, the radar responsibility may be divided between various controllers, each with their own screen and radio communications frequency, and will go under such names as:
Other markings besides the range circles may be superimposed upon the screen as a video map to indicate the location of nearby controlled airspace, aerodromes, radio navigation aids such as VORs and NDBs, restricted areas, etc.
Coverage
All radar systems operate at VHF or above, therefore range is limited to line of sight as with VOR, the maximum range may be limited by the following:
Errors and accuracy
The main factors that affect the reliability and accuracy of primary radar are:
In an attempt to remove some of the "clutter" from the radar screen, an electronic sifting device called a Moving Target Indicator (MTI) will only show return signals from a target that is in motion (i.e. not clouds or high terrain).
Secondary surveillance radar (SSR)
Secondary Surveillance Radar removes most of the limitations of Primary Radar simply by adding energy to the return pulse from the aeroplane, using a device carried on board the aeroplane known as a Transponder.
Operation
The SSR ground equipment consists of:
The SSR airborne equipment consists of a transponder carried in the individual aeroplane.
The originating signal transmitted from the ground station triggers an automatic response from the aeroplane's transponder. It transmits a strong answering coded signal which is then received at the ground station. This response signal is much, much stronger than the simple reflected signal used in primary radar. Even a very weak signal received in the aircraft will trigger a strong response from the transponder.
The secondary responding pulse from the aeroplane's transponder can carry coding which will allow the controller to distinguish the aeroplane from all others on the radar screen. Depending upon the code selected in the transponder by the pilot, it can also carry additional information such as:
A significant advantage is that SSR is not degraded to the same extent as primary radar by weather or ground clutter:
Modes and codes
Typical transponder modes, selected by the Function Selector Knob, include:
Knobs are provided to select the appropriate code for the transponder, the selected code being prominently displayed in digital form.
Figure: transponder An important procedure to follow when selecting and altering codes is to avoid passing through vital codes (such as 7700 for emergencies, 7600 for radio failure) when the transponder is switched ON. This can be avoided by selecting STANDBY whilst the code is being changed.
The Reply-Monitor Light will flash to indicate that the transponder is replying to an interrogation pulse from a ground station. It will glow steadily when:
When the IDENT button is pressed by the pilot upon request from the radar controller to SQUAWK IDENT, a special pulse is transmitted with the transponder's reply to the interrogating ground station. This causes a special symbol to appear for a few seconds on the radar screen around the return from the aircraft's transponder, thus allowing positive identification by the radar controller.
The term Squawk, which is often used in radio communication, is confined to transponder usage, and the instruction following squawk is usually quite clear, for instance: "Squawk Ident"; "Squawk Code 4000"; "Squawk Mayday" (7700), etc.
Very High Frequency Direction Finding (VHF D/F or VDF)
Operation
One of the benefits of modern navigation and radio systems is that a pilot has the option of asking a suitably equipped ground station for his relative bearing to or from that particular ground station.
This means that the pilot can determine his position (by using another VDF readout or NDB station) and heading more accurately should he become disorientated.
Some aerodromes are equipped with radio aerials which can sense the direction of VHF-COM signals (i.e. normal voice signals) received from an aeroplane. This information is presented to the air traffic controller (usually the approach controller) as a radial line on a Cathode Ray Tube similar to a radar screen or, with the most modern VDF equipment, as a very accurate digital readout of bearing.
The controller can then advise the pilot of his bearing relative to the aerodrome. This is known as Very High Frequency Direction Finding, and is often abbreviated to VHF D/F or VDF.
An advantage of VDF is that no specific airborne equipment is required other than a VHF-COM, i.e. a normal VHF communications radio.
A typical VDF air/ground exchange would be a pilot requesting ATC to provide his QDM (magnetic bearing to the ground station), followed by the controller advising it. By steering the QDM, the pilot is able to home to the ground station, i.e. head towards it. Consequently, ground stations that are equipped to provide VDF are designated by the term Homer.
Whereas no special equipment is required in the aeroplane for VDF other than a VHF-COM radio, it does require a special installation at the ground station. Two typical designs for VDF aerials at aerodromes are the H-type aerial (a double-H dipole aerial in technical terms), or the Doppler-type VDF aerial.
Bearings that a pilot may request from a VDF operator are:
QDR, the magnetic bearing from the station, is useful for orientation (where am I?). QDR is similar information to a VOR radial.
QTE, the true bearing from the station, is useful if the pilot wants to plot a position line from the VDF ground station to the aeroplane on a map (against True North).
QDM is the most commonly requested bearing. It is the heading to steer direct to the VDF station provided no crosswind exists. In a crosswind, however, a Wind Correction Angle (WCA) into-wind must be used to counteract the drift if a reasonably straight track is to be achieved, rather than a curved homing.
At typical light aircraft speeds, it is reasonable for the pilot to request a QDM each half-minute or so to check tracking, and to modify heading if necessary.
Accuracy and Errors
The main problem associated with VDF is that of wind drift. If the pilot is flying in unknown wind conditions, any bearing he is given by the ground station assumes that there is no wind, and so no allowance is made to the bearing.
As successive bearings are obtained, the pilot should be able to see that he is drifting left or right of the desired track and therefore make the appropriate adjustments to his heading.
The quality of the bearings obtained by VDF is classified by the VDF ground operator to the pilot as:
Most modern equipment is generally accurate to +/-1°, although accuracy may be decreased by:
GPS
Global Positioning System (GPS) is a satellite-based radio navigation and time dissemination system that is used by many people to accurately determine their position at any point on earth. It has been developed by the U.S. Department of Defense.
The global GPS system consists of three segments:
Operation
There are a wide variety of receivers on the market, which differ in functionality, operating procedures and in their suitability to be used for aeronautical navigation. Knowing how to operate the receiver is vital before relying on it for navigation. GPS receivers contain extensive databases which should be current and checked to be correct and suitable before used in navigation. After switching the unit on, initialisation will proceed, which can be extensive – in particular when the unit has not been used for some time or has been relocated over long distances while switched off. Allow time for this initialisation process.
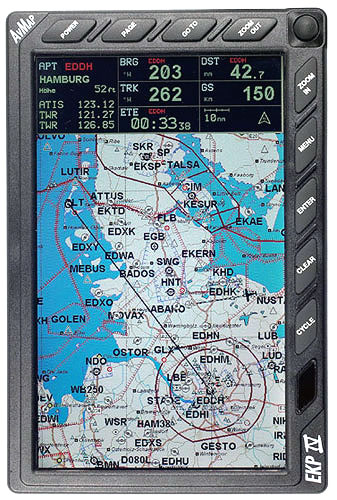
Figure: GPS receiver Coverage
The system will operate anywhere on earth as long as the appropriate number of satellites are in line of sight (i.e. above the horizon of the receiver).
Accuracy and Errors
GPS course deviation is linear, i.e. the tracking sensitivity is independent of the position of the receiver. Most low cost GPS units will provide a reading that is accurate up to 100m. Higher cost units can be accurate to within 1m. The US Government limits the accuracy attainable with a GPS unit to the person or organisation using it e.g. military users are able to achieve more precise positioning than members of the public (including General Aviation Pilots).
GPS receivers can be very complex devices – so most errors probably occur due to incorrect operation or interpretation. Pilots should be careful to observe placards, selector switch positions, and annunciator indication when using GPS. Receivers should only be utilised for its approved purpose.
GPS NOTAMs will announce satellite outages where necessary. This concludes the page on aeronautic navigation instruments. You can now go on to the Practical Navigation Principles page or try the Navigation Instrument Quiz Page |